Semantic Reconstruction
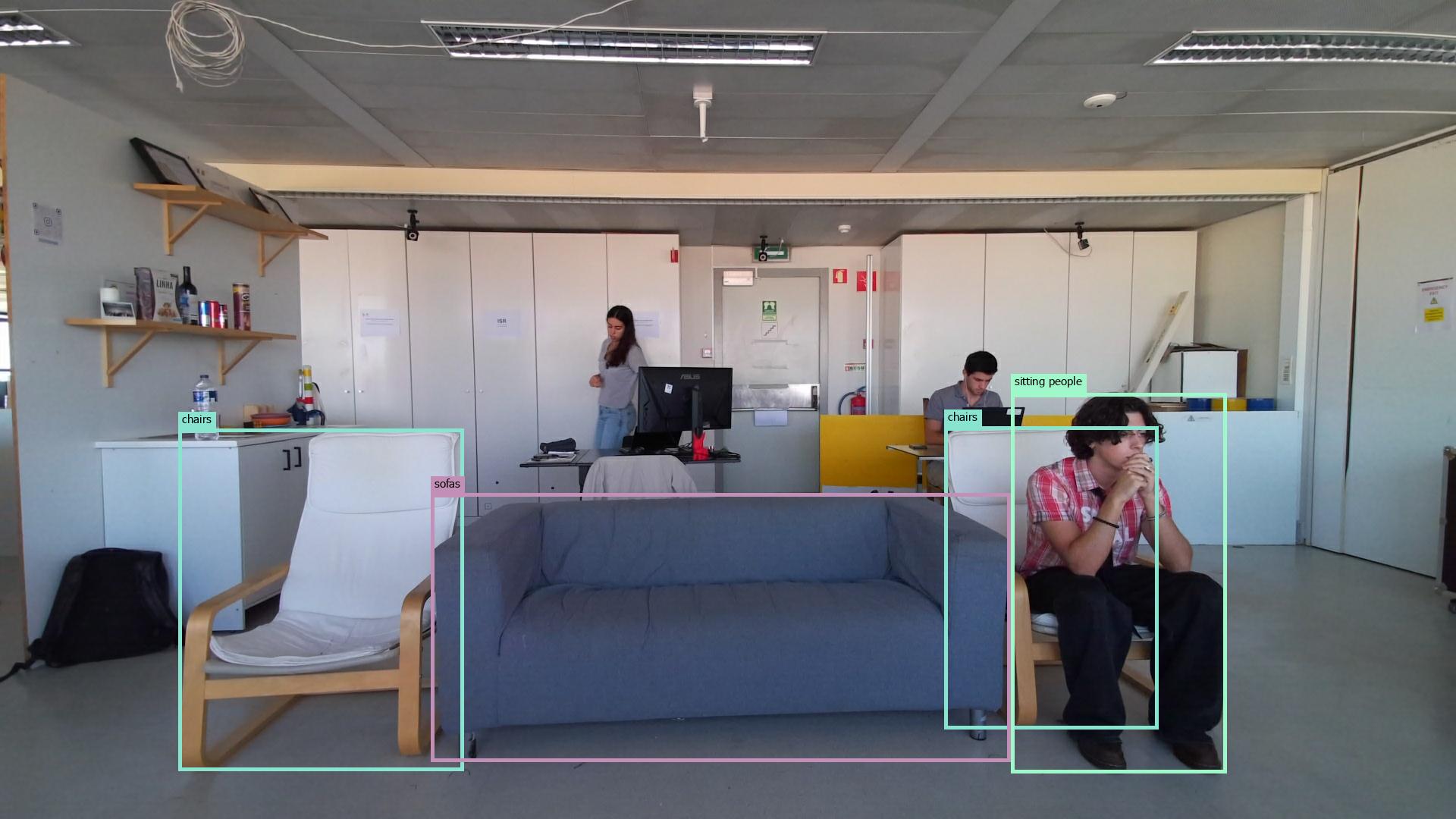
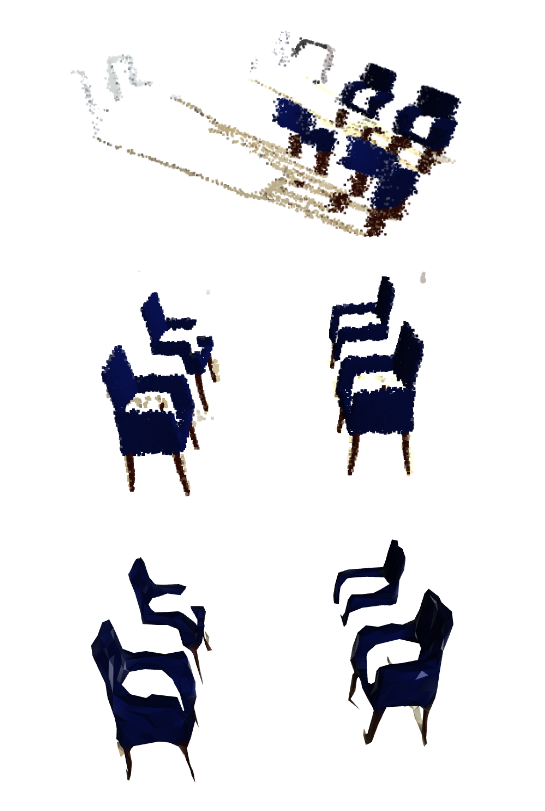
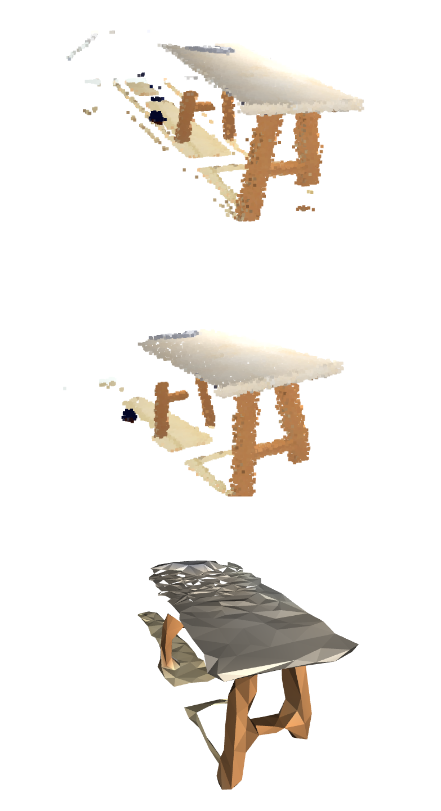
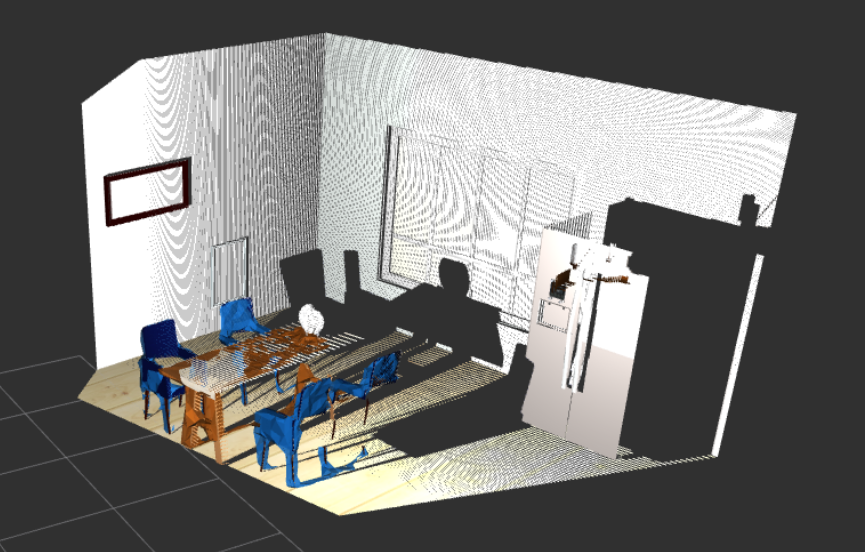
A ROS 2 package for semantic mapping in domestic environments. The pipeline starts in a Gazebo-simulated environment. When the camera is oriented toward the desired surfaces, object detection and segmentation tools are used (currently YOLO with the COCO dataset, soon to be SAM 3). Based on the 2D segmented images, the system extracts 3D point clouds for each detected class. These point clouds are filtered and reconstructed into 3D meshes using Open3D. The meshes are saved in map coordinates and published as a MarkerArray for visualization in RViz. Different colors are assigned to different object classes in order to distinguish them semantically. This project is still in development for perception and manipulation tasks for RoboCup 2026. Click on 'View Project' to see the repository.
View project